Your Cart is Empty

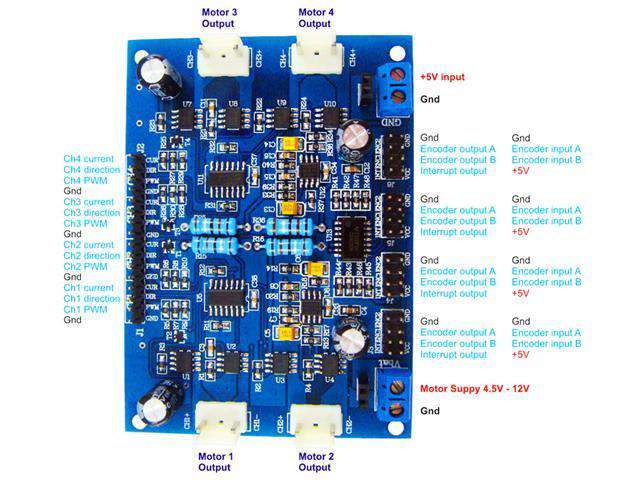
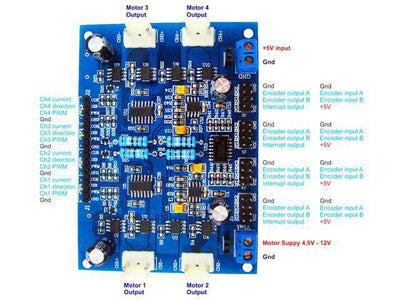
SKU: DGU 4CH 4,5A MOTOR CONTROL BOARD
BRAND: Dagu
Sold Out

Shop Online
and fill your cart
Choose Payflex at checkout
Get approved and
pay 25% today
with your debit
or credit card
Pay the remainder
over 6-weeks.
No interest.
No fees.





